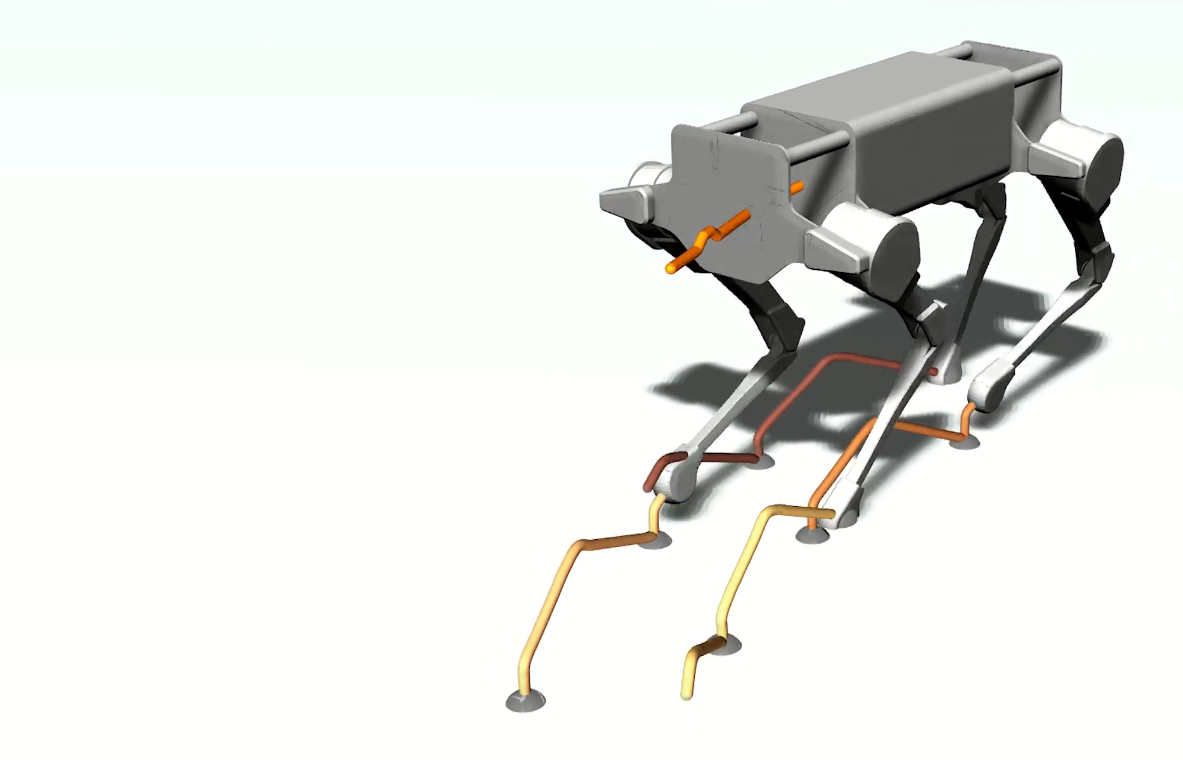
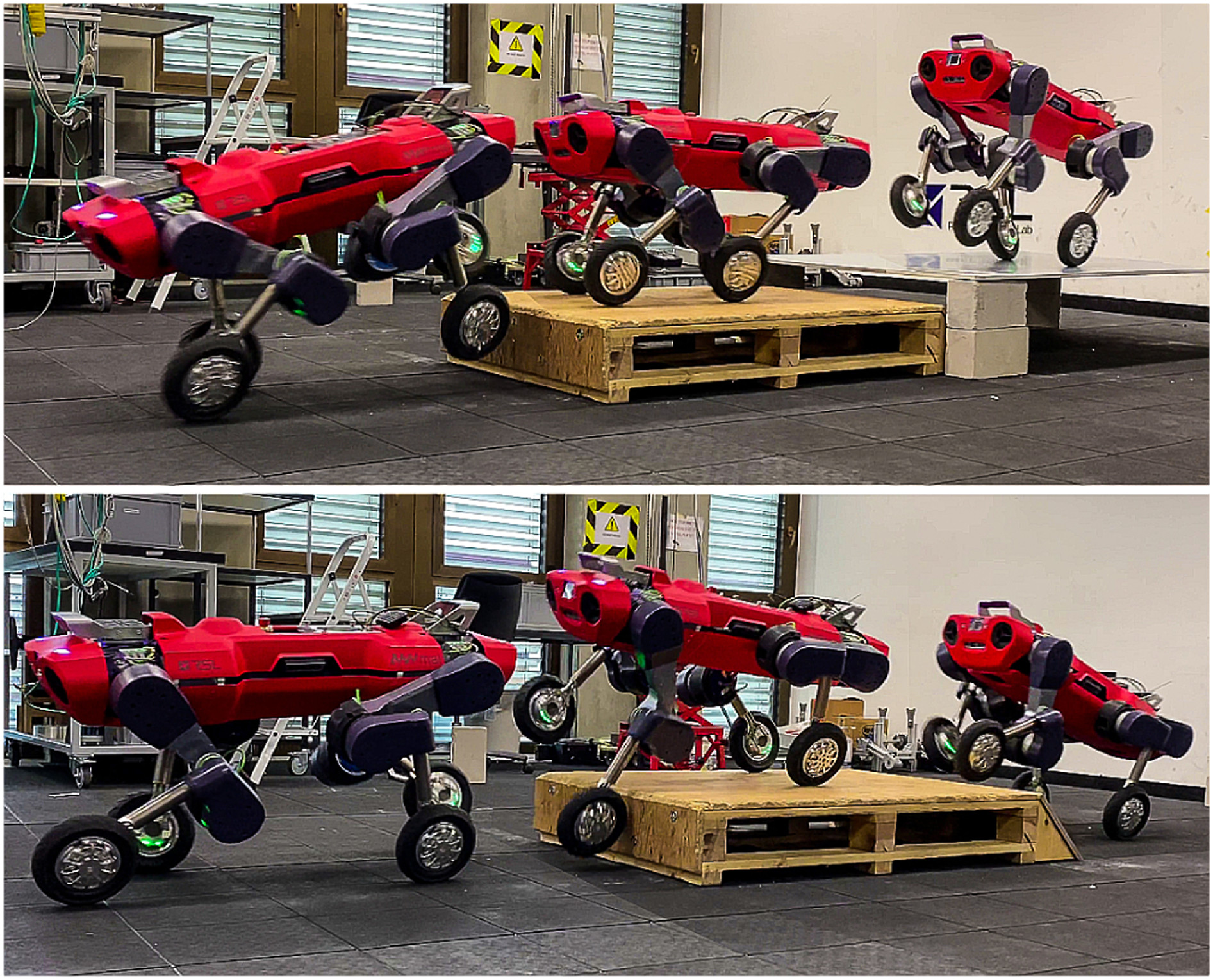
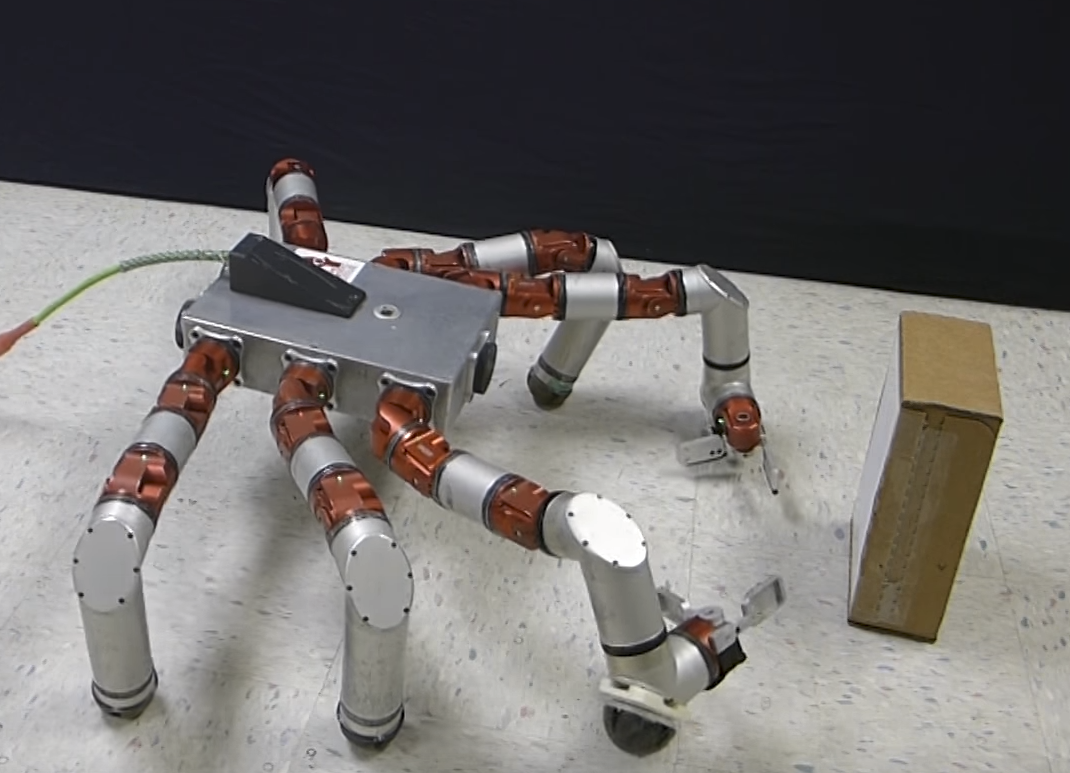
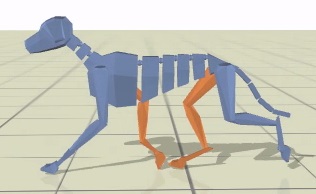
Practice Makes Perfect: An Optimization-Based Approach to Controlling Agile
Motions for a Quadruped Robot
Christian Gehring, Stelian Coros, Marco Hutter, C. Dario Bellicoso, Huub
Heijnen, Remo Diethelm, Michael Bloesch, Péter Fankhauser, Jemin Hwangbo, Markus A. Hoepflinger,
Roland Siegwart
IEEE Robotics And Automation Magazine, 2016 (Best Paper Award)
PDF




















.png)